SeaPerch
SeaPerch is an international underwater robotics competition, hosted by RoboNation and supported by the US Office of Naval Research, Autodesk, and more. The goal of the program is to create a remotely operated vehicle(ROV) that can complete a series of tasks, which vary by year. The ROV will be operated from outside the water and tethered to the robot by a single cable which is responsible for all power and communication. Teams compete yearly on the Local, Regional, and International levels, to continuously improve and innovate on their designs.
For this project, I was team co-captain and responsible for all 3D design and manufacturing tasks. I started by creating a 3D Mockup of our prototype ROV frame and creating the first iteration of accessories and mounts. From there, I started prototyping using different simulation programs and various FDM printing materials and styles for a functional version. Eventually, I found the most efficient structure types and shapes to improve hydrodynamics and strength-to-weight/size ratios. From there, I finished the final models, went through the necessary post-processing, and finally installed them onto the ROV.
Here are some images that show some of the models and drawings I created:
Model drawing using Fusion 360

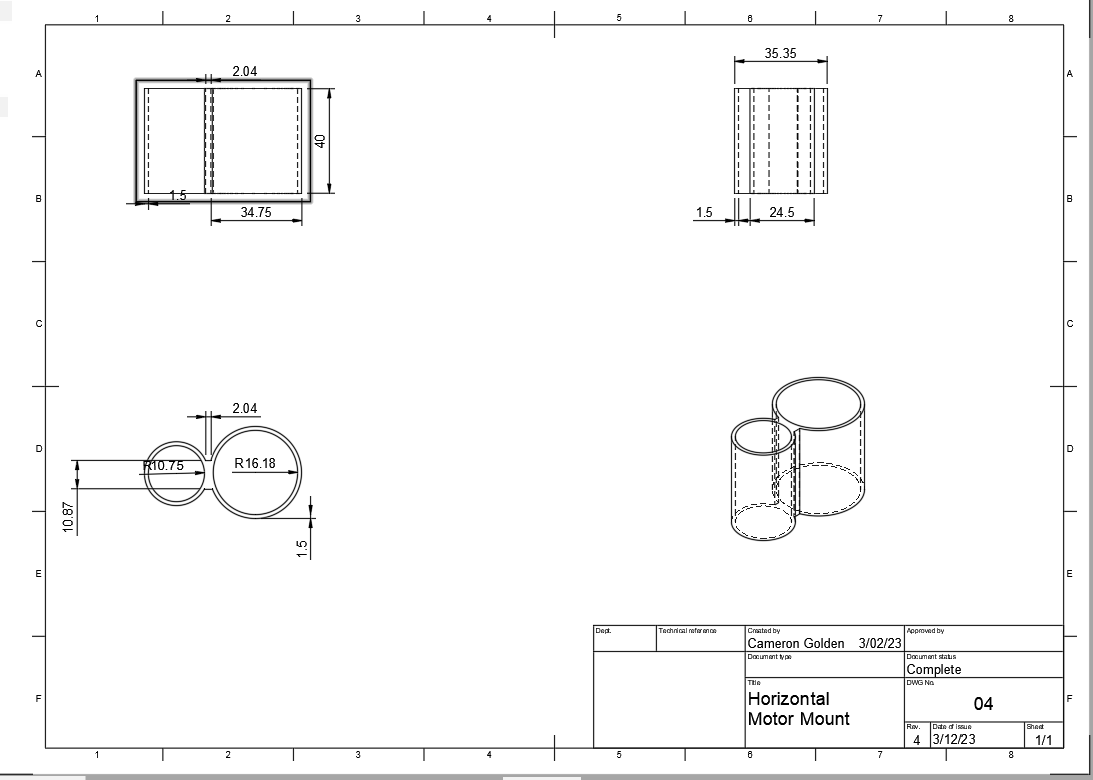
A different motor monut, also in fusion 360
You can learn more at the SeaPerch Website.